the da Vinci robotic surgery system
Depending on the number of arms which that particular model of the da Vinci system has, a human surgeon makes three or four incisions in the patient’s abdomen. Surgeons then insert the corresponding number of rods into the abdomen. One of the rods is fitted with cameras which show a 3D image of the patient’s inner tissues while the remaining rods are fitted with surgical instruments which dissect and suture the tissue. The da Vinci’s robotic arms hold the rods in place and also move them as the operation is carried out.
The cameras on one of the rods relay 3D images to the surgeon. Like a video game, he then uses joystick-like controls to manipulate the surgical instruments located on the other rods. When he is done, the rods are removed and the surgeons stitch the incisions closed. In this way, he is able to perform complex operations without making large incisions in the patient’s body, with the help of the robot In 2000, Da Vinci Robotic Surgery System becomes the first system that was approved by the Food and Drug Administration (FDA). (Bonsor & Strickland, How Robotic Surgery Will Work, 2008). the CardioArm
A snakelike surgical robot makes it easier for surgeons to perform critical heart operations. It can enter through a single point in the chest and wrap around the heart until it reaches the right place to remove problematic tissue. It is better than the da Vinci because the da Vinci can’t “squeeze into tight locations within the human body” and also requires quite a few entryways (the CardioArm requires one only).
In the future, perhaps a few CardioArms will be used in conjunction, branching out in the body after entering it through the same entryway. It is also being tested whether CardioArms may be used in natural-orifice surgery where tissues are removed through existing openings in the body e.g. the mouth (Grifantini, 2008). THE ZEUS system
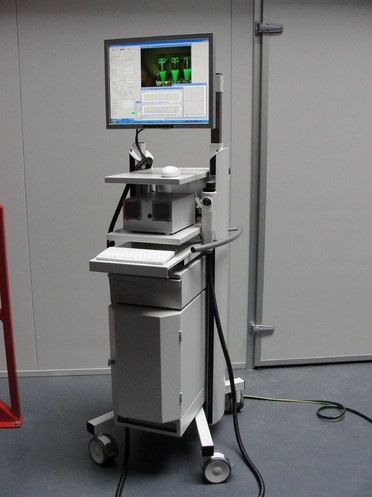
The Zeus system is composed of a surgeon control console and 3 table-mounted robotic arms. The right and left robotic arms replicate the arms of the surgeon, and the third arm is an AESOP voice-controlled robotic endoscope for visualization.
In the Zeus system, the surgeon is seated comfortably upright with the video monitor and instrument handles positioned ergonomically to maximize dexterity and allow complete visualization of the OR environment. The system uses both straight shafted endoscopic instruments similar to conventional endoscopic instruments and jointed instruments with articulating end-effectors and 7 degrees of freedom (Lanfranco, A, Castellanos, A, Desai, J and Meyers, W. 2004) |


|

THE artemis systemSchurr et al at Eberhard Karls University’s section for minimally invasive surgery have developed a master-slave manipulator system that they call ARTEMIS.
ARTEMIS, which stands for the Advanced Robotics and TElemanipulator System for Minimally Invasive Surgery, is designed as an integrated telepresence system for planning, training and performing different minimally invasive surgical procedures. The main components are two master-slave units guiding the surgical instruments and a remote controlled endoscope guiding system. Each master-slave device consists of the slave or work unit and the master or control unit which are interconnected by a computer based control system. The structure of the work unit ensures a precise motion around the incision point through the abdominal or thoracic wall. The powered endoscope guiding system is equipped with a 3D-endoscope. The computer based control system interconnecting control and work units has an open system architecture which allows to couple differently designed masters and slaves, monitoring systems, graphical system and user interfaces. The endoscope can be guided by a simple joystick, voice control or automatic camera tracking. (Lanfranco, A, Castellanos, A, Desai, J and Meyers, W. 2004) |
|
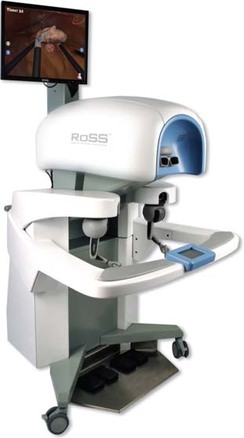
ROSS ROBOTIC SURGICAL SIMULATORRobotic Surgical Simulator (RoSS) is a training system that uses virtual reality for robot-assisted surgery. Being the world’s first robot-assisted surgical simulator would accurately simulates the Da Vinci Robotic Surgical system. It is expanding rapidly and is expected to cover a majority of all surgeries within the next five to seven years. )Rosewell Park Cancer Institute, n.d.) RoSS is the only robotic surgery simulator featuring full-length surgical procedures in 3D. (Simulated Surgical Systems LLC, 2009)
|
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}